
текст
В MIT разработали управляемого мышцами робота
Сигналы от бицепсов и трицепсов подсказывают ему, что нужно делать.
Если два человека тащат что-то тяжёлое, они договариваются друг с другом, когда поднимать позу, когда следует развернуться или остановиться. А если представить ситуацию, что приходится нести что-нибудь вместе с роботом? «Эй, Кортана, раз-два-взяли»?
К сожалению, в этом случае возможны задержки, которые не устроили инженеров из MIT. Проведя ряд испытаний. они пришли к выводу, что все их ИИ делают паузу после получения голосовой команды. Нашлись недочёты и у систем с лидарами и другими датчиками, реагирующими на движения. Тогда они пришли к выводу, что гораздо эффективнее сделать робота, который будет реагировать непосредственно на движения мышц.
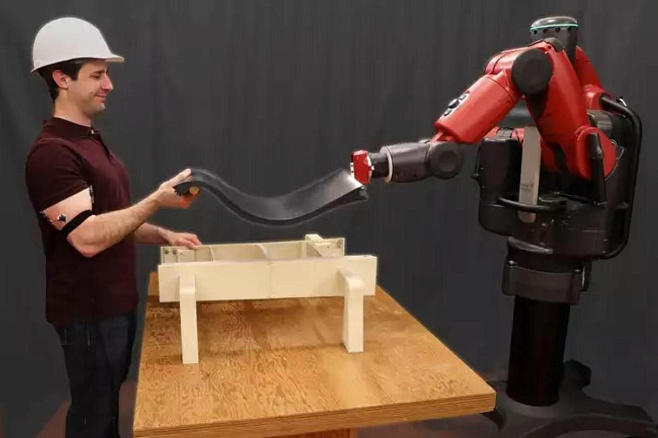
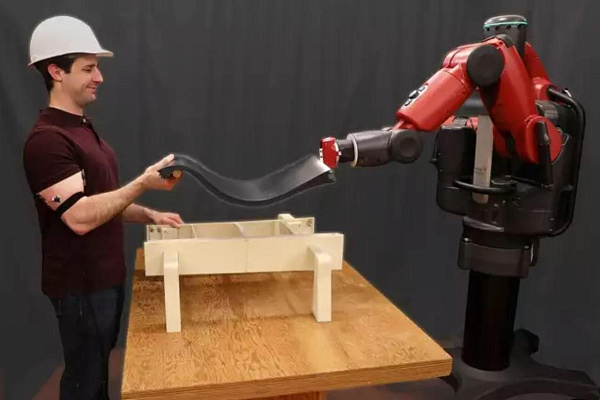
Бицепсенсорный робот получает сигналы благодаря электродам, прилепленным к плечу человека и соединёнными с роботом. Это обеспечивает отличную коммуникацию, при которой сигналы поступают к роботу прямо из человеческих мышц.
Робот буквально «отзеркаливает» движения напарника, безукоризненно выполняя сваю часть работы.
Пока машина реагирует на сигналы движения рукой вверх и вниз, а ещё «понимает», когда происходит сгибание рук в локте. Чтобы скомандовать роботу самому поднять что-то, достаточно просто слегка поднять и опустить запястье.
Нейронная сеть, используемая для обучения таких робо-грузчиков совместной работе, интерпретирует поступающие к ней мышечные сигналы до 80 раз в секунду и, получив нужные «команды», начинает управлять роботом.
Исследование профинансировала компания Boeing, но наверняка такие помощники могут оказаться полезны не только на больших предприятиях. Именно поэтому разработка MIT выглядит весьма перспективно.
Фото: MIT
К сожалению, в этом случае возможны задержки, которые не устроили инженеров из MIT. Проведя ряд испытаний. они пришли к выводу, что все их ИИ делают паузу после получения голосовой команды. Нашлись недочёты и у систем с лидарами и другими датчиками, реагирующими на движения. Тогда они пришли к выводу, что гораздо эффективнее сделать робота, который будет реагировать непосредственно на движения мышц.
«Наша система призвана облегчить совместную работу людей и роботов», — говорит Джозеф Дельпрето, доктор MIT, автор статьи, в которой описывается эта система.
Бицепсенсорный робот получает сигналы благодаря электродам, прилепленным к плечу человека и соединёнными с роботом. Это обеспечивает отличную коммуникацию, при которой сигналы поступают к роботу прямо из человеческих мышц.
«Когда вы что-то поднимаете, робот может понять, как интенсивно вы это делаете, и сколько планируете затратить усилий, после чего моментально подстроится под вас», — пояснил разработчик.
Робот буквально «отзеркаливает» движения напарника, безукоризненно выполняя сваю часть работы.
Пока машина реагирует на сигналы движения рукой вверх и вниз, а ещё «понимает», когда происходит сгибание рук в локте. Чтобы скомандовать роботу самому поднять что-то, достаточно просто слегка поднять и опустить запястье.
Нейронная сеть, используемая для обучения таких робо-грузчиков совместной работе, интерпретирует поступающие к ней мышечные сигналы до 80 раз в секунду и, получив нужные «команды», начинает управлять роботом.
Исследование профинансировала компания Boeing, но наверняка такие помощники могут оказаться полезны не только на больших предприятиях. Именно поэтому разработка MIT выглядит весьма перспективно.
Фото: MIT
Технологии
Вячеслав Ларионов
Машины и Механизмы
Всего 0 комментариев

 Экологи нашли «вредителей», уничтожающих озоновый слой
Экологи нашли «вредителей», уничтожающих озоновый слой  В США разработали перспективный аналог кремниевым солнечным панелям
В США разработали перспективный аналог кремниевым солнечным панелям







