
В ИТМО разрабатывают инновационных гибких роботов
Как сообщает SciencePop со ссылкой на пресс-службу ИТМО, метод разработчиков основывается на морфологическом проектировании, цель которого — снабдить роботов способностью решать комплексные задачи в неизвестных им условиях и при этом без задействования сложных алгоритмов.
«С помощью морфологического расчета мы проектируем сложную механическую систему, действия которой будут определены простыми алгоритмами. Большая часть требуемой динамики уже заложена в самой системе, а алгоритмы необходимы только для стабилизации и дополнения движения механизмов робота», — пояснил один из разработчиков гибких роботов Иван Борисов.
Также учёный пояснил, что морфологическое проектирование позволяет производить аппараты, которые могут контролировать и корректировать движения и поведение роботов. Такой метод — залог высокой энергоэффективности технологий.
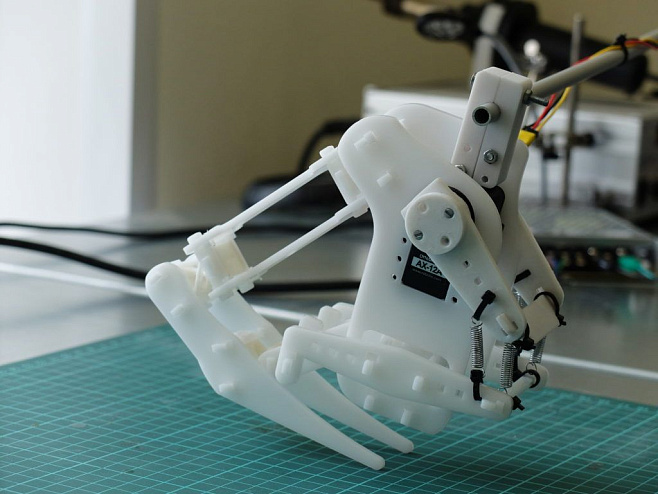
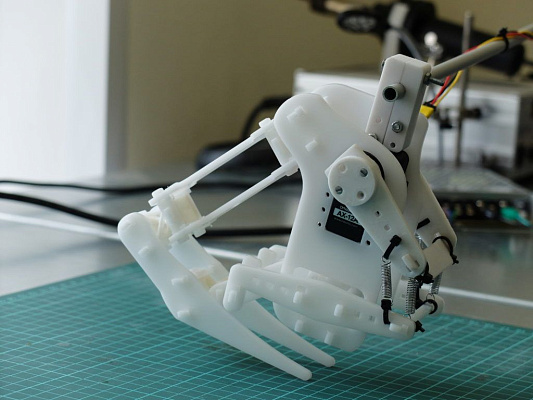
Свою разработку в действии инженеры успешно продемонстрировали на примере прототипа компактного прыгающего робота. Вскоре планируется усовершенствование устройства — оно сможет перемещаться галопом и будет иметь гибкую спину.
Фото: Екатерина Шевырева, ITMO.NEWS
Технологии
Антон Тальский

 В Пермском Политехе создали нетоксичный огнеупорный материал
В Пермском Политехе создали нетоксичный огнеупорный материал В Камеруне впервые за 20 лет обнаружили африканского леопарда
В Камеруне впервые за 20 лет обнаружили африканского леопарда







