
текст
Робот, повторяющий биологию змеи
Вдохновленный природой робот-змея может быть полезен для лучшего понимания поведения рептилий или иметь несколько биогибридных робототехнических приложений.

В последние годы все большее число исследований было направлено на разработку роботов, вдохновленных природой, особенно некоторыми видами животных. В исследовании, опубликованном в Atlantis Press' Journal of Robotics, группа исследователей из Университета Бордо и Токийского университета создала робота, который по форме и движениям напоминает змею.
«Основная цель этого исследования состояла в том, чтобы разработать робота для биомедицинских применений, особенно для повреждений спинного мозга. Мы хотели бы разработать новые нейропротезы, в которых искусственные нейроны могут заменить биологические. В нашем роботе мы использовали биомиметическую локомоцию с использованием биомиметических пиковых нейронных сетей, которые воспроизводят то же поведение, что и змеи в природе», – заявил Тимоте Леви, один из исследователей.
Одной из ключевых задач при разработке роботов, вдохновленных биологией, является эффективное воспроизведение движения интересующего животного. У животных большинство движений генерируется активностью сетей центральной генерацией паттерна (ЦГП).
По сути, ЦГП представляют собой нейронные контуры, которые при активации могут создавать ритмические двигательные паттерны (например, ходьбу, дыхание, плавание и т. Д.) В отсутствие сенсорных и временных привязок.
По сути, ЦГП представляют собой нейронные контуры, которые при активации могут создавать ритмические двигательные паттерны (например, ходьбу, дыхание, плавание и т. Д.) В отсутствие сенсорных и временных привязок.
Как правило, исследователи, которые пытаются разработать роботов, похожих на животных, воспроизводят ЦГП, используя простые нейронные модели или осцилляторы. Эти модели, однако, не способны точно воспроизвести различные паттерны передвижения животных.
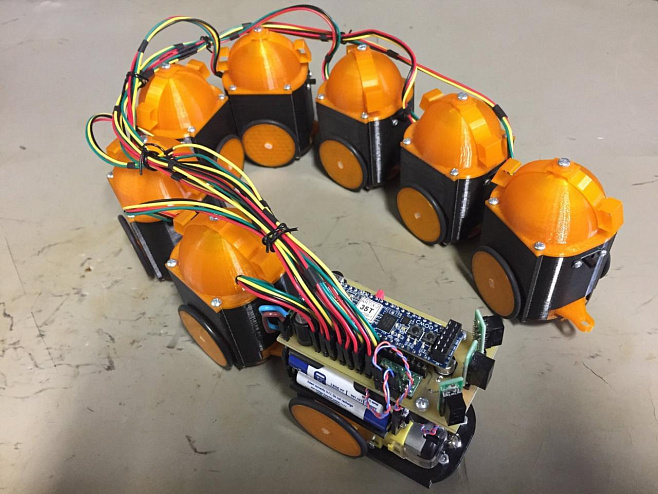
В своем исследовании Леви и его коллеги намеревались разработать биомиметические ЦГП, которые могут эффективно копировать биологическое поведение, используя цифровую нейроморфную систему в реальном времени. Разработанный ими змеиный робот имеет два ключевых компонента: один действует как его мозг, а другой – как его тело.
В своем исследовании Леви и его коллеги намеревались разработать биомиметические ЦГП, которые могут эффективно копировать биологическое поведение, используя цифровую нейроморфную систему в реальном времени. Разработанный ими змеиный робот имеет два ключевых компонента: один действует как его мозг, а другой – как его тело.
Робот-змея, созданный Леви и его коллегами, в реальном времени контролируется сетью биомиметических ЦПГ. Исследователи показали, что их система может быть связана с биологическими нейронами, а также может использоваться для моделирования различных гипотез или протокольных процедур для биомедицинских применений, таких как травмы спинного мозга и нейропротезирование.
В будущем робот-змея, разработанный Леви и его коллегами, может найти множество интересных приложений в робототехнике и других областях. Например, его можно использовать для лучшего понимания поведения рептилий или иметь несколько биогибридных робототехнических приложений.
Фото: Blanchard, Aihara & Levi.
Технологии
Полина Агеева
Машины и Механизмы
Всего 0 комментариев

 Связь 5G в Британии будут тестировать на коровах
Связь 5G в Британии будут тестировать на коровах История человечества на вашем лице
История человечества на вашем лице







