
текст
Робот, который понимает без слов
Успешно проведен ряд исследований по взаимодействию робота и человека с целью разработки эргономических методов управления роботами, в частности с помощью жестов.


Роботизированная техника используется во многих областях, но роботы следующего поколения должны будут работать на одних рабочих площадках с людьми, в режиме полного взаимодействия, помогая их работе. 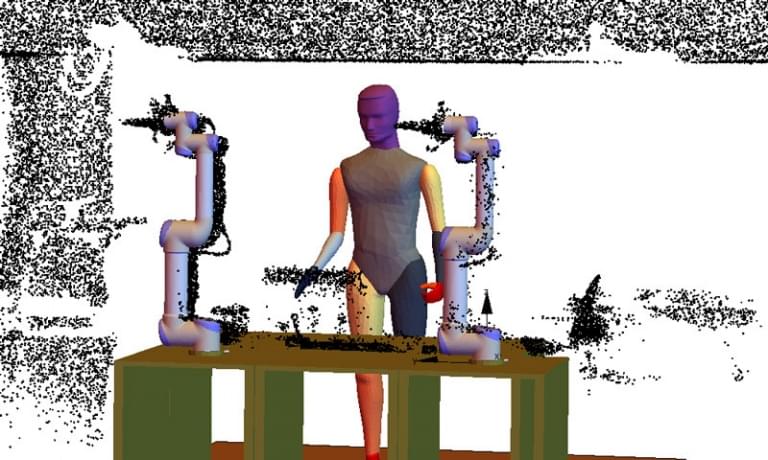 На рисунке-схеме авторы исследования показали частичное пространственное представление модели, включающей робота, оператора и предметы из данного рабочего места. Подобное представление должно включать все подробности производственной площадки, представленные в показаниях датчиков, для хранения которых используется база данных.
На рисунке-схеме авторы исследования показали частичное пространственное представление модели, включающей робота, оператора и предметы из данного рабочего места. Подобное представление должно включать все подробности производственной площадки, представленные в показаниях датчиков, для хранения которых используется база данных.
Внедрение таких общих рабочих мест создает новые проблемы, такие как безопасность человека и определение простого и однозначного коммуникационного интерфейса между человеком и роботом. Методом решения задачи и инструментом исследований в Институте вычислительной математики и кибернетики MTA Szaki (Венгрия) была выбрана цифровая модель, так называемый "цифровой двойник" (Digital Twin). Его данные были получены на рабочей станции, состоящей из датчика Microsoft Kinect версии 2, коллаборативного манипулятора UR5 компании Universal Robots и человека-оператора.
На рисунке-схеме авторы исследования показали частичное пространственное представление модели, включающей робота, оператора и предметы из данного рабочего места. Подобное представление должно включать все подробности производственной площадки, представленные в показаниях датчиков, для хранения которых используется база данных.Обновление всех данных цифровой модели в реальном режиме времени имеет первостепенное значение, так как цифровая обработка должна предоставлять те же данные, как и моделируемый ею реальный производственный процесс. Цифровая модель рассматривалась в дальнейшем как источник информации при запуске задач симуляции процесса производства. Быстрые вычисления позволяют оптимизировать процесс. В данной модели исследовалось построение геометрических и кинематических взаимодействий между неподвижными и подвижными объектами рабочего места, между человеком и роботом, между человеком и человеком, даже между роботом и роботом.
Была выполнена калибровка Digital Twin как с традиционной точки зрения возможностей робота: операционной области и ограничений, так и сточки зрения настоящего исследования, в виде набора транформируемых операций системы. В результате длительной и ресурсоемкой калибровки и была построена данная конкретная цифровая модель.
Результат
По сообщению авторов исследования удалось ввести в модель виртуальные датчики, которые помогали роботу правильно выбрать оператора - источник команды. Виртуальные датчики значительно экономят время моделирования.
Также удалось произвести распознавание жестов - команд оператора на основе полного анализа взаимного расположения и движения частей тела оператора.
Также удалось произвести распознавание жестов - команд оператора на основе полного анализа взаимного расположения и движения частей тела оператора.
В результате исследований удалось недвусмысленно передавать команды от человека к роботу, безошибочно взаимодействовать при передаче предмета от робота к человеку; робот понимал жесты оператора взять предмет, передача осуществлялась в любой точке рабочего пространства по желанию оператора, робот демонстрировал свое состояние готовности также жестами.

Технологии
Игорь Перескоков
Машины и Механизмы
Всего 0 комментариев

 Дар Валдая и запрет Сената
Дар Валдая и запрет Сената Не буря, а дождь в пустыне
Не буря, а дождь в пустыне







