текст
Устройство ног насекомых вдохновило ученых на создание усовершенствованной функции захвата у роботов
Международная исследовательская группа под руководством Кильского университета (CAU) и Университета Южной Дании (SDU) разработала роботов с оптимизированной функцией захвата предмета. Кроме того, эта функция впервые была перенесена на элементы ног роботов, что позволит им лучше ходить по неровным поверхностям.
На ногах многих насекомых есть поперечные элементы, которые позволяют надежно крепиться к разным поверхностям. Группа ученых, занимающаяся разработкой роботов, изучала лапки различных насекомых, например, кустарникового сверчка Tettigonia viridissima, чтобы понять механизм, который используют насекомые для передвижения по разным поверхностям.
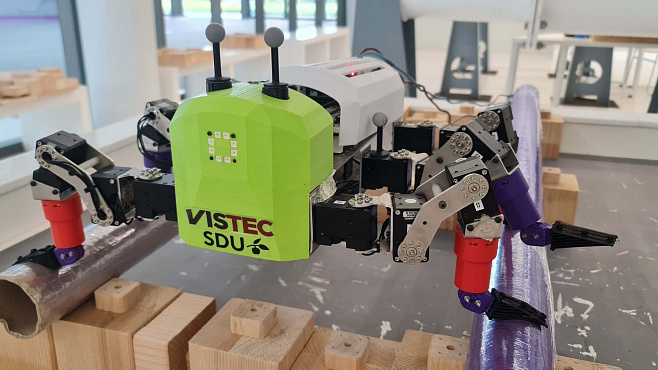
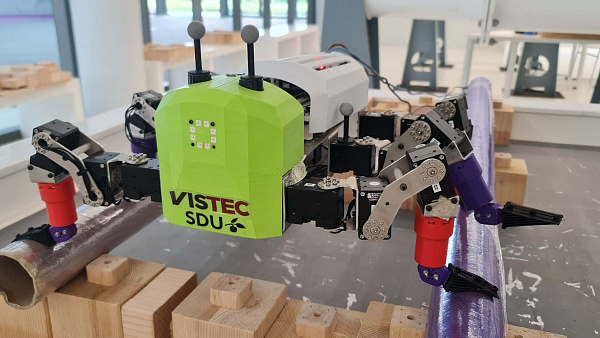
Исследователи из Кильского университета использовали компьютерное моделирование для расчета сил, которые будут действовать на элементы захвата у роботов. Они проверили свои результаты с помощью экспериментов и измерений силы на структурных моделях, полученных с помощью 3D-принтера. Был разработан новый способ технологии захвата предмета роботом.«Просто изменив угол на меньший, мы смогли добиться того, что устройство легче изгибается вокруг объектов, обеспечивая более прочный захват, требующий меньшей силы. Это означает, что мы можем сэкономить до 20% энергии робота и работать с очень деликатными и хрупкими предметами, такими как продукты питания. Это может повлиять на то, как вся промышленность будет производить роботизированные захваты», – считают авторы.Ученые попробовали применить усовершенствованную функцию захвата к элементам ног роботов. Были сконструированы ноги роботов со специальными поперечными балками, позволяющими огибать камни или трубы и получать большую площадь соприкосновения с ними. Было отмечено, что роботизированные системы с оптимальным углом наклона поперечных балок в 10° потребляли гораздо меньше энергии и двигались быстрее и легче, чем роботы с традиционным углом наклона поперечных балок в 90°. Результаты исследования были опубликованы в журнале Advanced Intelligent Systems.
Фото: Poramate Manoonpong
Технологии
Ксения Кулько
Машины и Механизмы
Всего 0 комментариев

 Ученые несколько лет изучали новый вид осы
Ученые несколько лет изучали новый вид осы  Ученые выяснили, как разновидность озерной мухи может плавать в воде
Ученые выяснили, как разновидность озерной мухи может плавать в воде