текст
Инженеры из Стэнфорда создали мягкого робота
Исследователи Стэнфордского университета разработали новый тип мягкого робота, который функционален так же, как и традиционная робототехника, но является более безопасным.
Достижения в области мягкой робототехники могут когда-нибудь позволить роботам работать рядом с людьми, помогая им поднимать тяжелые предметы или выносить их из опасности. В качестве шага к этому будущему исследователи Стэнфордского университета разработали новый тип мягкого робота.
С этой отправной точки ученые и начали. В итоге они получили мягкого робота человеческого масштаба, который может изменять свою форму, что позволяет ему захватывать и обрабатывать объекты и двигаться в контролируемых направлениях. Их изобретение описано в статье, опубликованной 18 марта в Science Robotics.
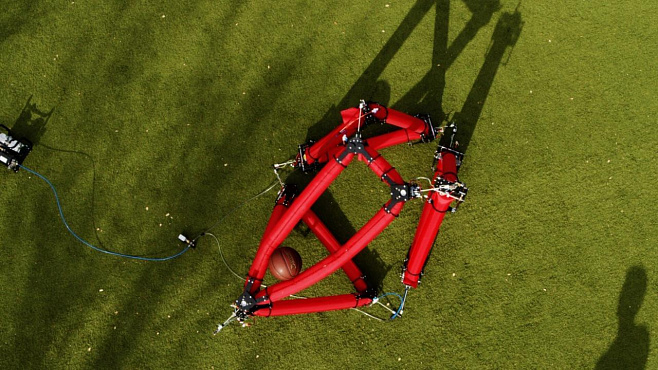
Самая простая версия этого мягкого робота — надутая труба, которая проходит через три маленьких машины, которые зажимают ее в форме треугольника. Одна машина удерживает два конца трубки вместе; два других движутся вдоль трубы, изменяя общую форму робота, перемещая его углы. Исследователи называют его «изопериметрическим роботом», потому что (хотя форма резко меняется) общая длина ребер и количество воздуха внутри остаются неизменными.

Аспиранты Захари Хаммонд (слева) и Натан Усевич поднимают и перемещают изопериметрического робота, демонстрируя, что он легкий, устойчив к повреждениям и безопасен для людей. Фото: Farrin Abbott/ Stanford University.
Изопериметрический робот является потомком трех типов роботов: мягких роботов, ферменных роботов и коллективных роботов. Мягкие роботы легки и совместимы, ферменные роботы имеют геометрические формы, которые могут изменять форму, а собирательные роботы — это маленькие роботы, которые работают вместе, что делает их особенно сильными в условиях отказов из одной части.
Область мягкой робототехники относительно молодая, а это значит, что люди все еще находят лучшие применения для этих новых творений. Их безопасная, но прочная мягкость может сделать их полезными в домах и на рабочих местах, где традиционные роботы могут причинить травмы. Squishy роботы также привлекательны в качестве инструментов для реагирования на бедствия.
«Существенным ограничением большинства мягких роботов является то, что они должны быть прикреплены к громоздкому воздушному компрессору или подключены к стене, что препятствует их движению. Итак, мы задались вопросом: что, если мы будем постоянно держать в роботе одинаковое количество воздуха?», — сказал Натан Усевич, аспирант по машиностроению в Стэнфорде.
С этой отправной точки ученые и начали. В итоге они получили мягкого робота человеческого масштаба, который может изменять свою форму, что позволяет ему захватывать и обрабатывать объекты и двигаться в контролируемых направлениях. Их изобретение описано в статье, опубликованной 18 марта в Science Robotics.
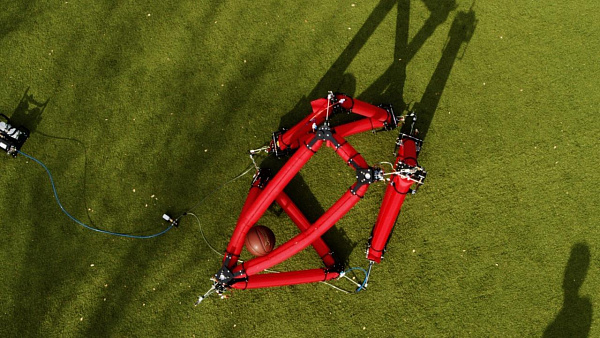
Самая простая версия этого мягкого робота — надутая труба, которая проходит через три маленьких машины, которые зажимают ее в форме треугольника. Одна машина удерживает два конца трубки вместе; два других движутся вдоль трубы, изменяя общую форму робота, перемещая его углы. Исследователи называют его «изопериметрическим роботом», потому что (хотя форма резко меняется) общая длина ребер и количество воздуха внутри остаются неизменными.
Аспиранты Захари Хаммонд (слева) и Натан Усевич поднимают и перемещают изопериметрического робота, демонстрируя, что он легкий, устойчив к повреждениям и безопасен для людей. Фото: Farrin Abbott/ Stanford University.
«Ключевое понимание, которое мы разработали, заключалось в том, что для создания движения с помощью большого мягкого пневматического робота вам не нужно накачивать и впускать воздух. Вы можете использовать воздух, который у вас уже есть», — сказал Эллиот Хоукс, доцент кафедры машиностроения в Университете Калифорнии, Санта-Барбара и со-старший автор статьи.
Область мягкой робототехники относительно молодая, а это значит, что люди все еще находят лучшие применения для этих новых творений. Их безопасная, но прочная мягкость может сделать их полезными в домах и на рабочих местах, где традиционные роботы могут причинить травмы. Squishy роботы также привлекательны в качестве инструментов для реагирования на бедствия.
Другие захватывающие возможности для изопериметрического робота могут находиться вне планеты. Захари Хаммонд, аспирант по машиностроению в Стэнфорде и соавтор статьи, объясняет:
«Этот робот может быть очень полезен для исследования космоса, особенно потому, что его можно перевозить в небольшом пакете, а затем он работает без привязи после того, как надувается».
На данный момент исследователи экспериментируют с различными формами для своего гибкого робота и рассматривают возможность поместить его в воду, чтобы посмотреть, умеет ли он плавать. Они также изучают еще больше новых типов мягких роботов, каждый из которых имеет свои особенности и преимущества.
Фото: Farrin Abbott/ Stanford University
Технологии
Татьяна Лебедева
Машины и Механизмы
Всего 0 комментариев

 Запах из прошлого: ученые выяснили, как запахи могут помочь вернуть воспоминания
Запах из прошлого: ученые выяснили, как запахи могут помочь вернуть воспоминания Древняя ископаемая рыба раскрывает эволюционное происхождение человеческой руки
Древняя ископаемая рыба раскрывает эволюционное происхождение человеческой руки