Инженеры из MIT создали роботов для сбора хрупких и мягких вещей
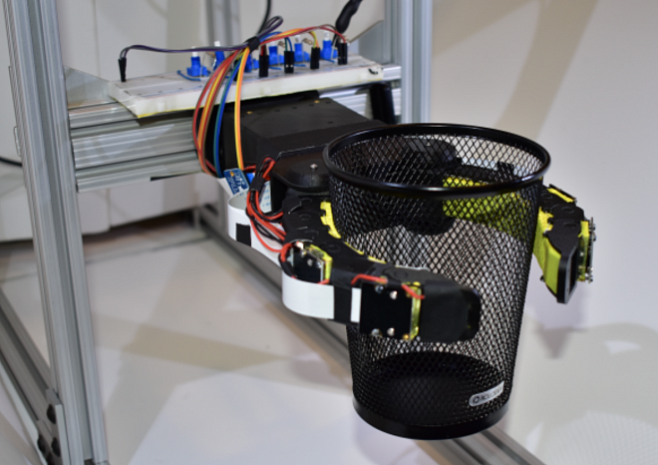
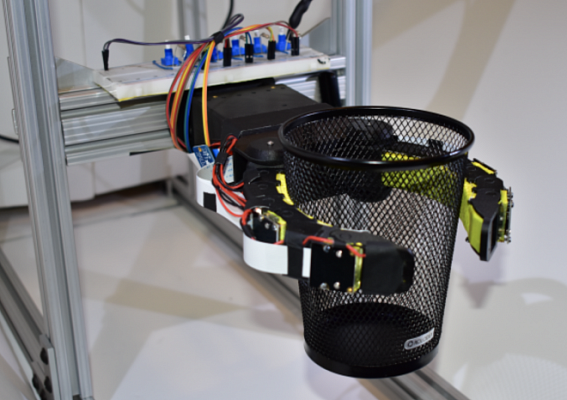
Робо-захват способен поднимать предметы, которые весят в сто раз больше, чем он сам. Затем захват усовершенствовали, снабдив датчиками осязания. Благодаря этому робот смог научиться поднимать даже очень хрупкие предметы, например, чипсы. При этом робота научили классифицировать собранные вещи, чтобы в будущем он тоже не забывал прикладывать к ним соответствующую силу, предварительно распознавая, что именно он сейчас подберёт.
Затем манипулятор снабдили тактильными датчиками из латексных шариков, которые подсоединили к датчикам давления. К системе написали специальный алгоритм, который использует обратную связь для того, чтобы понять, какие усилия нужно приложить для взаимодействия с предметом. Сейчас робот-хвататель протестирован на тяжёлых бутылках, банках, яблоках, мешке с печеньем и зубной щёткой. Судя по всему, робот пока справляется.
Другая команда из MIT изготовила роботизированный щуп GelFlex, напоминающий пальцы. Он использует глубокое обучение и встроенные камеры для имитации тактильных ощущений. Захват напоминает то, как мы берём стакан двумя пальцами, большим и указательным. У каждого робо-пальца есть две камеры: одна в середине, другая у кончика. Обе наблюдают за состоянием поверхностей пальца, а нейронная сеть оценивает полученную с камер информацию, сообщая роботу о том, какие нужно приложить усилия для сбора и удержания предмета.
Фото: MITТехнологии
Вячеслав Ларионов

 Создан работающий через смартфон имплант для диабетиков
Создан работающий через смартфон имплант для диабетиков Китайский радиотелескоп FAST приступит к поиску инопланетян осенью
Китайский радиотелескоп FAST приступит к поиску инопланетян осенью