Японский инженер создал самособираемый кубик Рубика
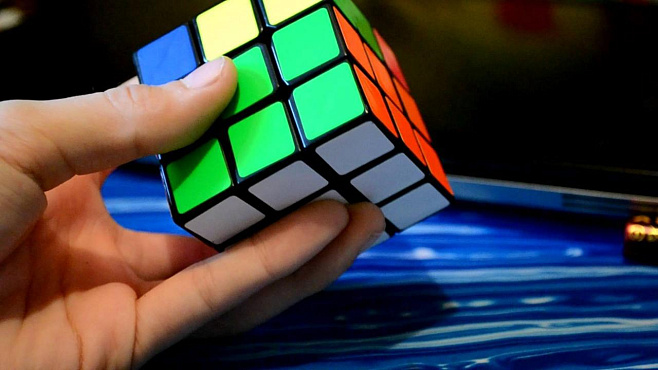
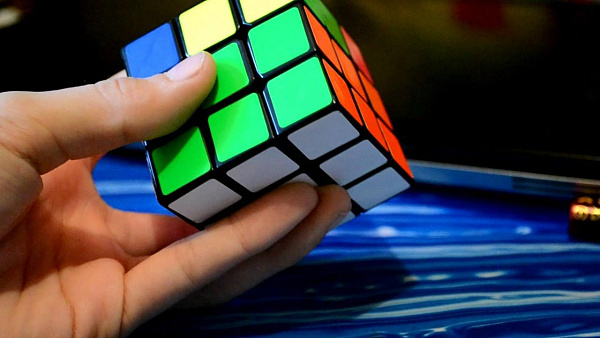
Японский инженер создал роботизированный кубик, собирающий сам себя. Первый прототип он показал в том году, но тогда он был не совсем удачным, медленно собирался и требовал внешний осциллограф, который регистрировал повороты элементов на основе данных с датчиков угла поворота.
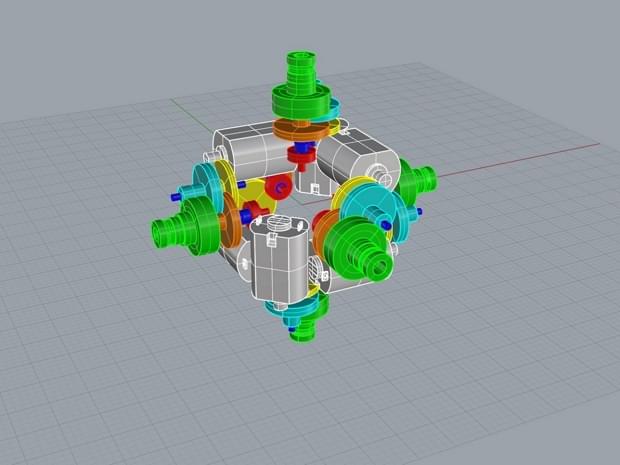
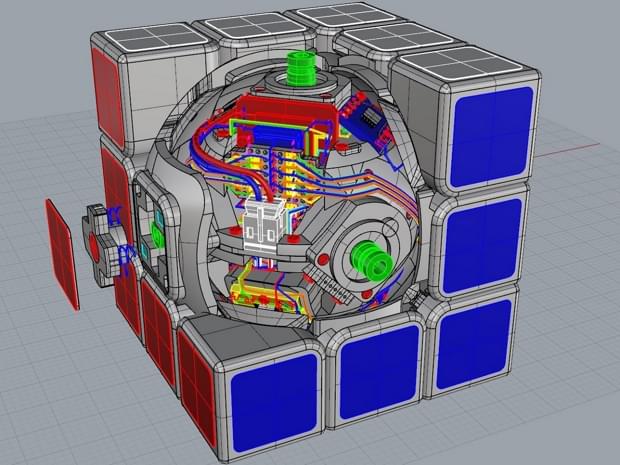
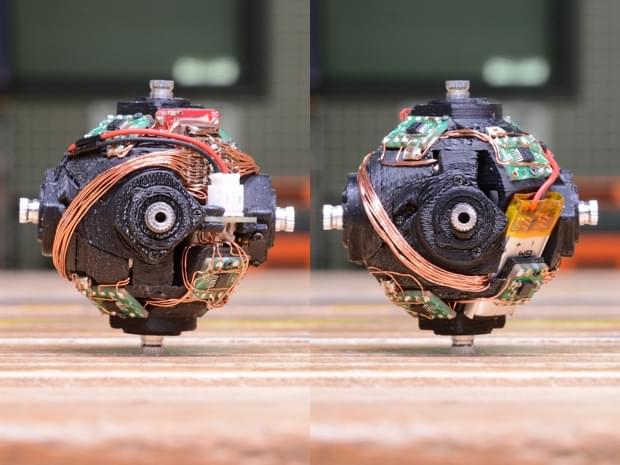
Обновленный прототип - обычного для кубика Рубика размера и работает автономно. В его основе лежит двигательный механизм, в котором для каждого ребра есть электромотор и шестерни, передающие усилие на ось с закрепленными на ней сегментами. Кроме того, во внутренней части кубика, напечатанной на 3D-принтере, располагаются несколько микроконтроллеров и аккумулятор.
Инженер не рассказывает технических деталей кубика, обеспечивающих его работу, поэтому неизвестно, каким именно образом устройство отслеживает повороты и может ли оно самостоятельно определять исходное расположение сегментов, находясь в выключенном состоянии.
Технологии
Машины и Механизмы
-
Интересно, как сам Рубик относится к этой затее?



 MoonMars использует оригами, чтобы строить здания на Луне и Марсе
MoonMars использует оригами, чтобы строить здания на Луне и Марсе Как «ММ» сходил на ScienceFest
Как «ММ» сходил на ScienceFest