текст
Ученые Пермского Политеха разрабатывают мобильных роботов для эффективного сбора бытовых отходов с больших территорий
Экологическое загрязнение – это одна из основных проблем современности. Сегодня для борьбы с ней ведутся активные разработки роботов, которые быстро и тщательно очищают территории от мусора. Уже успешно применяются автоматические пылесосы и устройства для уборки городских улиц. Однако большие и сложные зоны, вроде лесов и степей, нуждаются в более нестандартных и индивидуальных решениях.
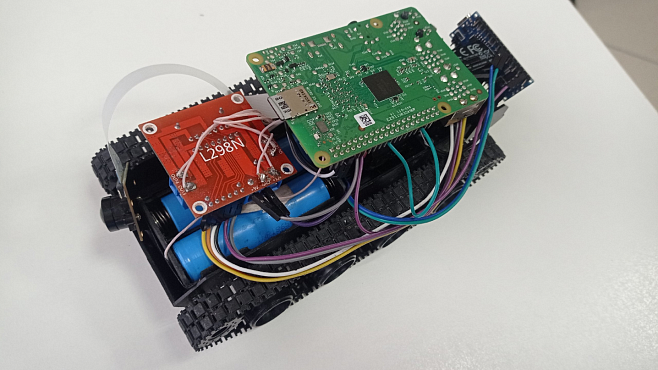
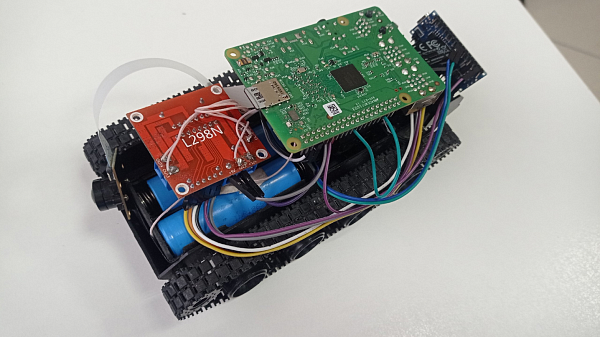
Прототип робота-разведчика. Фото: пресс-служба ПНИПУ
Ученые
Пермского Политеха работают над проектом по созданию роботов для качественной
очистки таких объектов. Идея заключается в распределении нагрузки между
несколькими машинами. Это обеспечит эффективное исследование сложной местности
и сбор мусора без лишней потери энергии. В большинстве случаев мусор оказывается в
водоемах, лесах, на пляжах и городских улицах в результате активной
деятельности человека. Оставленные на земле или неправильно выброшенные
пластиковые отходы, бутылки, окурки, пакеты и многое другое наносят вред окружающей
среде. В состав же добровольцев или рабочих людей, занимающихся сбором мусора в
общественных местах, входит всего 1-2% населения. Учитывая масштабы бытовых
отходов, разработка автоматических устройств – это эффективный и универсальный
способ для стабильной и качественной уборки территорий.
Существующие аналоги роботов-мусорщиков
представляют собой довольно крупные единицы, поглощающие отходы в свой
внутренний бак. Их недостаток в том, что они двигаются по всей заданной
территории и тратят энергию и время даже на те участки, которые находятся в
чистом состоянии, то есть работают «вхолостую». Использование такого робота
нецелесообразно, дорого и времязатратно.
Ученые Пермского Политеха работают над
проектом для очистки больших и сложных зон с применением нескольких подвижных
агентов – мобильных роботов, способных
самостоятельно принимать решение о перемещениях. Благодаря возможности беспрепятственно
исследовать местность, собирать данные и обмениваться ими между собой,
дальнейший сбор мусора будет быстрее и продуктивней.
– Вместо создания универсального
устройства эффективнее, если каждый из роботов будет выполнять часть общей
задачи, чтобы распределить нагрузку между всеми машинами. Поэтому мы предложили
такую модель: компактные роботы занимаются поиском, определяют местоположение
мусора и строят карту местности. Другие, более крупные, – собирают отходы по
сформированной карте. Это позволит не тратить энергию на лишние перемещения, а
также снизить возможный ущерб при передвижении тяжелых роботов по территории, –
объясняет Антон Посягин, доцент кафедры
«Автоматика и телемеханика» ПНИПУ, кандидат технических наук.
 Антон Посягин. Фото: пресс-служба ПНИПУ
Антон Посягин. Фото: пресс-служба ПНИПУ
Политехники отмечают, что для реализации идеи требуется большая исследовательская база, один из важнейших пунктов в которой – поиск оптимального метода быстрого построения карты местности с помощью подвижных агентов. Именно для решения этой задачи они разработали прототип робота-разведчика. Это модель размером с крупную радиоуправляемую машинку, которая перемещается с помощью гусеничных колес для лучшей проходимости. Внутри встроены двигатели, система мониторинга с камерой для фиксации происходящего на маршруте, радиомодуль для управления и передачи данных между другими роботами, гироакслерометр, отвечающий за изменение направления и скорости движения.
Антон Посягин. Фото: пресс-служба ПНИПУПолитехники отмечают, что для реализации идеи требуется большая исследовательская база, один из важнейших пунктов в которой – поиск оптимального метода быстрого построения карты местности с помощью подвижных агентов. Именно для решения этой задачи они разработали прототип робота-разведчика. Это модель размером с крупную радиоуправляемую машинку, которая перемещается с помощью гусеничных колес для лучшей проходимости. Внутри встроены двигатели, система мониторинга с камерой для фиксации происходящего на маршруте, радиомодуль для управления и передачи данных между другими роботами, гироакслерометр, отвечающий за изменение направления и скорости движения.
При исследовании местности важно выбрать
алгоритмы, которые оптимизируют временные затраты и повысят уровень
производительности всей системы – то есть позволят роботам очищать наибольшую
территорию с наименьшим расходом энергоресурсов и времени. Как наиболее
подходящие ученые Пермского Политеха выделили алгоритмы «спираль» и «поиск
центра местности», где устройства, не пересекаясь, проходят всю территорию от
одного угла до центра, чтобы оценить степень загрязненности. Их работу
сравнивали на специальном симуляторе с использованием одного, двух и трех
подвижных агентов. Наилучшим оказалась «спираль», так как практически вдвое
меньше затрачивается времени на выполнение задачи, а также значительно
снижается количество выполненных шагов для обследования пространства.
Реализация предложенного учеными ПНИПУ
проекта внесет большой вклад в борьбу с экологическими загрязнениями в лесах,
степях и на других крупных территориях. Роботизация обеспечит быстрый и
качественный сбор бытовых отходов.
Статья
опубликована в сборнике «Инновационные технологии: теория, инструменты,
практика», 2024 год
Технологии
ПНИПУ
Машины и Механизмы
Всего 0 комментариев

 Как электричество «живет» в нас и наших домах, рассказали ученые Пермского Политеха
Как электричество «живет» в нас и наших домах, рассказали ученые Пермского Политеха Ученые Пермского Политеха предложили эффективную технологию получения люмобетона
Ученые Пермского Политеха предложили эффективную технологию получения люмобетона