Разработан новый способ навигации мобильного робота в пространстве
Для того, чтобы выполнять необходимые предписанные им задания, роботы в первую очередь должны быть способны ориентироваться в реальных окружающих их условиях, маневрировать, избегать столкновения с объектами, которые их окружают. И если статичные бытовые предметы не представляют для движения роботов неразрешимого препятствия, так как столкновения с ними легко миновать, то движущиеся объекты, такие, как люди, представляют куда большую опасность для беспрепятственного пути робота. Ведь чтобы обойти или объехать человека роботу придется предсказывать его дальнейшие движения и действовать исходя из более динамичной ситуации.
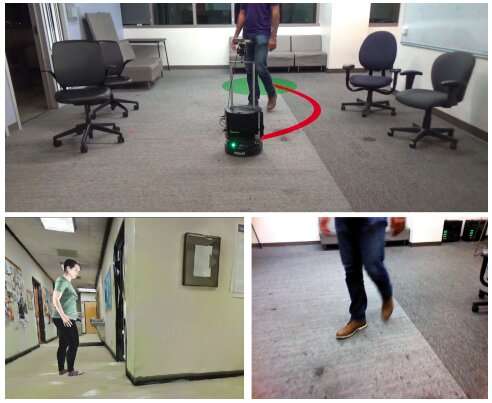
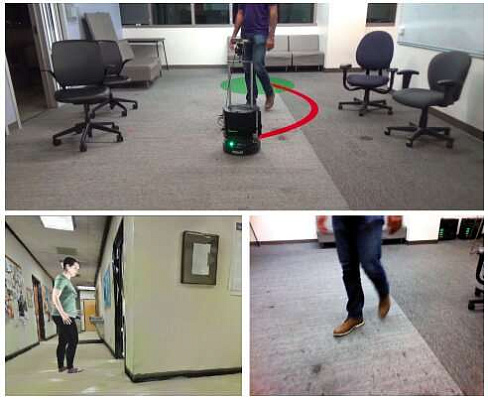
Исследователи из Университета Беркли (Калифорния) разработали новый способ навигации для мобильных роботов, сочетающий в себе технологии, основывающиеся на системах обучения робота в реальном времени и модельно-оптимальный способ контролирования робота.
Ученые утверждают, что в результате применения такого способа навигации, робот сможет вычислять потенциальные движения окружающих объектов (например, человека) и беспрепятственно перемещаться среди них.
По сравнению с подходом к навигации мобильных роботов, основывающимся только на системах самообучения, проект, предложенный исследователями, позволит роботам более эффективно адаптироваться в реальном окружающем пространстве — ведь проект комбинирует в себе процесс самообучения робота и контроль за роботом посредством моделирования. Это поможет мобильным роботам намного качественнее справляться с поставленными перед ними задачами.
Технологии
Антон Тальский

 Сон позволяет детям детально запоминать собственный опыт
Сон позволяет детям детально запоминать собственный опыт Обнаружен древнейший участок зарождения агрокультуры
Обнаружен древнейший участок зарождения агрокультуры