текст
От винта!
Мы уже разбирались в механизмах летательных аппаратов, но вот один из самых распространенных – вертолет – можно рассмотреть и более детально. Казалось бы, чего тут сложного: пропеллер крутится, он и летит. В реальности все, как всегда, куда сложнее.


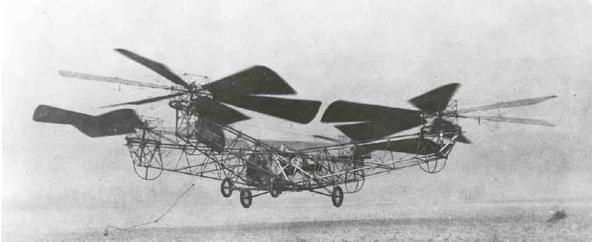
Чтобыnbsp; Идея летательного аппарата, использующего воздушную тягу от пропеллера, витала в воздухе довольно давно и занимала умы изобретателей на протяжении столетий. Еще в IV веке до н. э. в Китае запускали игрушки в виде палочки с пропеллером, которую нужно было раскрутить в руках. Мысль же о том, чтобы использовать воздушную тягу винта для полета человека, а движущий механизм расположить на самом летательном аппарате, впервые родилась у Леонардо да Винчи в 1488 году. От идеи до ее воплощения прошло четыре века, и первым, кому удалось хоть немного провисеть в воздухе на самодельном вертолете, был французский изобретатель и велолюбитель Поль Корню. В 1907 году он поднялся на высоту в полметра, где левитировал 20 секунд. Так и началась история пилотируемых геликоптеров.
МЕЖДУ ПАЛОЧКОЙ С ПРОПЕЛЛЕРОМ и современным вертолетом простирается история на целую книжную полку, однако принцип полета кардинально не изменился и со временем только корректировался дополнительными устройствами и изобретениями. Так как же летает вертолет?

Рулевой винт на вертолете Mu-28H ВВС России. Фото: Vladislav Perminov, www.maks.sukhoi.ru

Фенестрон на вертолете SA 365N2 Dauphin 2. Фото: JM Rotor 54, www.jetphotos.com
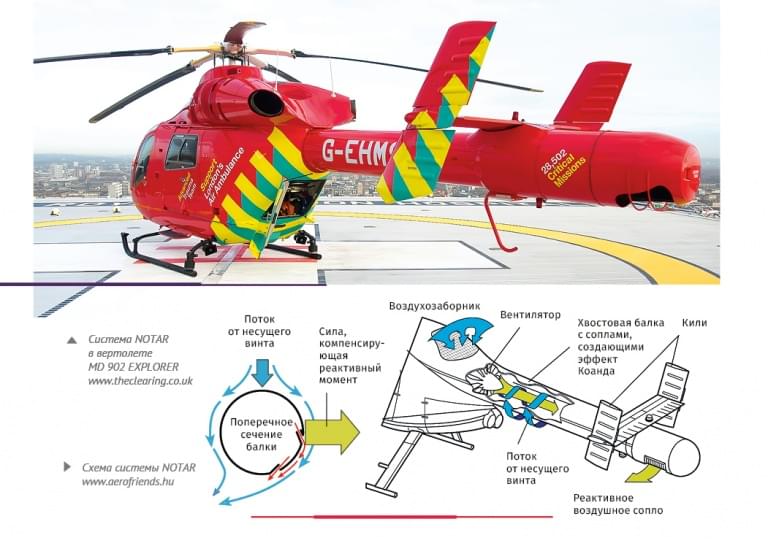
Фото сверху: Система NOTAR в вертолете MD 902 EXPLORER, www.theclearing.co.uk. Фото снизу: Система NOTAR, www.aerofriends.hu
Два винта вместо одного
Довольно очевидный метод устранения реактивного момента заключается в том, чтобы установить на летательный аппарат не один, а два винта, вращающихся в разные стороны и, соответственно, компенсирующих реактивные моменты друг друга. Впервые эта мысль пришла в голову Ломоносову: в 1754 году на конференции Академии наук он представил проект непилотируемого летательного аппарата с двумя винтами, расположенными на параллельных осях.
 Ka-50 - двухдвигательный одноместный вертолет с соосным расположением несущих винтов. Фото: Dmitriy Pichugin, www.airliners.net
Ka-50 - двухдвигательный одноместный вертолет с соосным расположением несущих винтов. Фото: Dmitriy Pichugin, www.airliners.net
 Вид из кабины вертолета Bell Griffin. Фото: Ian Forshaw, www.defenceimagery.mod.uk
Вид из кабины вертолета Bell Griffin. Фото: Ian Forshaw, www.defenceimagery.mod.uk
МЕЖДУ ПАЛОЧКОЙ С ПРОПЕЛЛЕРОМ и современным вертолетом простирается история на целую книжную полку, однако принцип полета кардинально не изменился и со временем только корректировался дополнительными устройствами и изобретениями. Так как же летает вертолет?
В современных вертолетах, как правило, используются винты с 2–4 лопастями, каждая из которых, по сути, представляет собой маленькое крыло, находящееся под углом к плоскости вращения. Когда винт крутится, каждая лопасть гонит воздушную массу вниз, а воздух, в свою очередь, давит на лопасть вверх, по третьему закону Ньютона. В результате от работы всех лопастей возникает подъемная сила, превышающая силу тяжести, и вертолет взлетает.
Таким образом, в геликоптере работает тот же принцип поступательно движущегося крыла, что и в самолете. Однако последнему требуется набрать определенную скорость во время разгона, чтобы давление воздуха на крыло было достаточным для взлета. Вертолету же не нужна взлетная полоса – его лопасти набирают нужную скорость вращательным движением. Поэтому он может совершать вертикальные взлеты и посадки, что является его неоспоримым преимуществом перед самолетом.
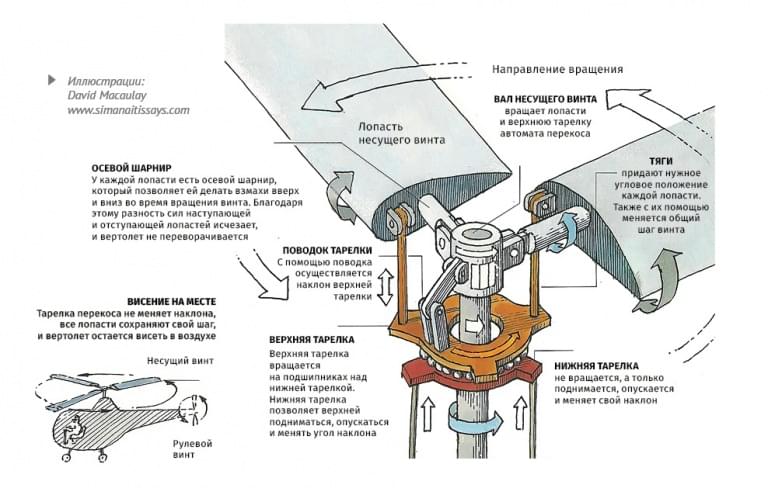
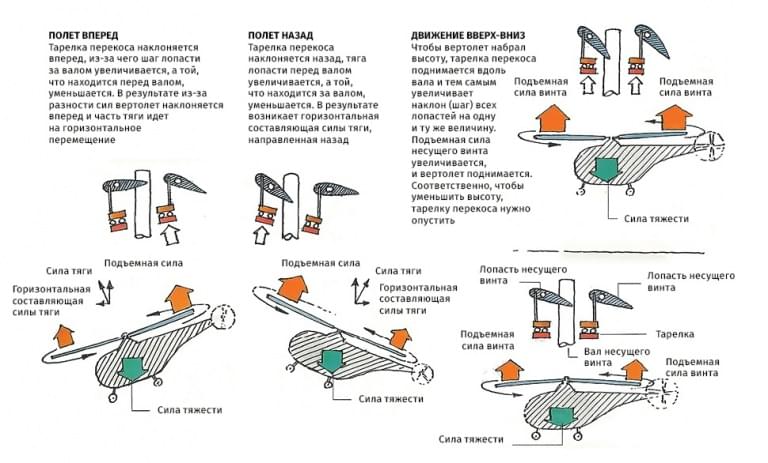
МОЖНО ПОДУМАТЬ, что для набора высоты летчик просто увеличивает скорость обращения винта. В действительности же скорость остается постоянной, а движение вверх-вниз осуществляется путем изменения угла наклона лопастей: для подъема вертолета его увеличивают, а для снижения – уменьшают. Для строго вертикального перемещения все лопасти поворачивают на один и тот же угол, то есть изменяют общий шаг винта. Вообще же угол каждой лопасти можно менять отдельно, и для этого каждый вертолет оснащен специальным механизмом – автоматом перекоса, расположенным под втулкой винта. С его помощью можно регулировать подъемную силу винта, но и не только…
МОЖНО ПОДУМАТЬ, что для набора высоты летчик просто увеличивает скорость обращения винта. В действительности же скорость остается постоянной, а движение вверх-вниз осуществляется путем изменения угла наклона лопастей: для подъема вертолета его увеличивают, а для снижения – уменьшают. Для строго вертикального перемещения все лопасти поворачивают на один и тот же угол, то есть изменяют общий шаг винта. Вообще же угол каждой лопасти можно менять отдельно, и для этого каждый вертолет оснащен специальным механизмом – автоматом перекоса, расположенным под втулкой винта. С его помощью можно регулировать подъемную силу винта, но и не только…
Вы наверняка спросите: как вертолет летит вперед, ведь у него нет сзади турбины, как у ракеты? С помощью все того же главного винта! Когда его лопасти проходят заднюю половину оборота, автомат перекоса увеличивает их угол наклона, что приводит к росту тяги на хвостовой части вертолета. Во время прохождения передней части оборота угол наклона, наоборот, уменьшается. Из-за такого распределения подъемной силы плоскость вращения винта вместе с корпусом вертолета наклоняется вперед, и часть тяги идет на его перемещение туда же. Горизонтальная составляющая тяги винта, конечно, может быть направлена не только вперед, но и в том направлении, которое необходимо в конкретной ситуации. Летчик может наклонить вертолет на бок или, скажем, полететь назад. Наклон вертолета относительно его продольной оси (в бок) называется креном, а относительно поперечной (нос вверх-вниз) – тангажем.
ЗВУЧИТ НЕ ОЧЕНЬ СЛОЖНО, и вроде бы с этими знаниями уже можно строить геликоптер и летать на нем. Первые конструкторы в начале прошлого века тоже так подумали, однако на практике столкнулись с рядом проблем. Основная заключалась в том, что в воздухе вертолет все время опрокидывался на бок. Дело тут вот в чем. Рассмотрим две лопасти: одна движется из крайнего заднего положения в переднее (назовем ее первой), а другая – наоборот, из переднего в заднее (а эту – второй). Когда первая лопасть делает свой полуоборот, то есть движется вперед, как и весь вертолет, ее скорость относительно набегающего воздуха больше, чем скорость второй лопасти, движущейся назад. Ведь к скорости первой прибавляется еще и скорость вертолета. А значит и подъемная сила, действующая на первую лопасть, больше той, что действует на вторую. В результате весь вертолет при попытке движения вперед будет переворачиваться.
ЗВУЧИТ НЕ ОЧЕНЬ СЛОЖНО, и вроде бы с этими знаниями уже можно строить геликоптер и летать на нем. Первые конструкторы в начале прошлого века тоже так подумали, однако на практике столкнулись с рядом проблем. Основная заключалась в том, что в воздухе вертолет все время опрокидывался на бок. Дело тут вот в чем. Рассмотрим две лопасти: одна движется из крайнего заднего положения в переднее (назовем ее первой), а другая – наоборот, из переднего в заднее (а эту – второй). Когда первая лопасть делает свой полуоборот, то есть движется вперед, как и весь вертолет, ее скорость относительно набегающего воздуха больше, чем скорость второй лопасти, движущейся назад. Ведь к скорости первой прибавляется еще и скорость вертолета. А значит и подъемная сила, действующая на первую лопасть, больше той, что действует на вторую. В результате весь вертолет при попытке движения вперед будет переворачиваться.
Чтобы уменьшить подъемную силу первой лопасти и избежать переворота, автомат перекоса поворачивает ее на меньший угол, чем вторую лопасть. Благодаря этому разность сил, действующих на винт, полностью компенсируется, и вертолет летит прямо.
Получается, что автомат перекоса выполняет сразу три функции: позволяет регулировать высоту полета, обеспечивает управление по крену и тангажу, а также устраняет «переворачивающий момент».
Ну что ж, теперь вертолет не переворачивается, принцип полета понятен, и кажется, сейчас-то нам ничто не помешает полететь. Но есть еще один нюанс, который не позволит нам этого сделать. Дело тут в реактивном моменте, который возникает при вращении главного винта: если он, например, вращается по часовой стрелке, то, согласно закону сохранения импульса, корпус вертолета должен будет вращаться против часовой стрелки. А на такой карусели далеко не улетишь! Кстати, тот самый проект геликоптера, который разработал Леонардо да Винчи, был обречен на провал в том числе из-за неучтенного реактивного момента. Но это гению Возрождения простить можно, ведь он еще не знал о третьем законе Ньютона, открытом только 200 лет спустя.
ТАК КАК ЖЕ в наше время устраняют реактивный момент? На сегодняшний день существуют четыре основных способа.
Рулевой винт
Конструкция с рулевым винтом на хвостовой балке занимает, пожалуй, первое место по популярности среди одновинтовых вертолетов. Тяга этого винта направлена перпендикулярно направлению полета, и поэтому с его помощью можно управлять поворотом вертолета по горизонтали, то есть по курсу, или, как еще говорят пилоты, по рысканию.
ТАК КАК ЖЕ в наше время устраняют реактивный момент? На сегодняшний день существуют четыре основных способа.
Рулевой винт
Конструкция с рулевым винтом на хвостовой балке занимает, пожалуй, первое место по популярности среди одновинтовых вертолетов. Тяга этого винта направлена перпендикулярно направлению полета, и поэтому с его помощью можно управлять поворотом вертолета по горизонтали, то есть по курсу, или, как еще говорят пилоты, по рысканию.
Основное преимущество такого строения – простота конструкции, что очень важно при массовой сборке вертолетов и их починке. Вдобавок рулевой винт, помимо компенсации реактивного момента и обеспечения управлением по курсу, выполняет роль статического стабилизатора, улучшающего путевую устойчивость вертолета во время полета.
Рулевой винт на вертолете Mu-28H ВВС России. Фото: Vladislav Perminov, www.maks.sukhoi.ru
С несущим винтом рулевой винт связан при помощи трансмиссии, поэтому скорость его вращения напрямую зависит от скорости вращения главного винта. Из-за этого тягу рулевого винта можно регулировать только за счет изменения углов наклона его лопастей – они также являются подвижными, как и лопасти несущего винта.
Главный недостаток конструкции с рулевым винтом состоит в том, что на его работу расходуется часть мощности двигателя, которая не дает ни подъемной силы, ни движущей вперед.
Фенестрон
Фенестрон – это все тот же рулевой винт, но вмонтированный непосредственно внутрь киля, закрытый и защищенный от внешних воздействий. У такой конструкции есть и другие преимущества перед классическим открытым винтом.
Во-первых, фенестрон гораздо меньше в диаметре – примерно в 2,5 раза.
Главный недостаток конструкции с рулевым винтом состоит в том, что на его работу расходуется часть мощности двигателя, которая не дает ни подъемной силы, ни движущей вперед.
Фенестрон
Фенестрон – это все тот же рулевой винт, но вмонтированный непосредственно внутрь киля, закрытый и защищенный от внешних воздействий. У такой конструкции есть и другие преимущества перед классическим открытым винтом.
Во-первых, фенестрон гораздо меньше в диаметре – примерно в 2,5 раза.
Фенестрон на вертолете SA 365N2 Dauphin 2. Фото: JM Rotor 54, www.jetphotos.com
Во-вторых, рулевой винт не задевает посторонние предметы и на предельно малых высотах.
В-третьих, фенестрон эффективнее открытого винта – при одинаковых диаметрах ему нужно меньше энергии.
Однако есть у конструкции с фенестроном существенный минус: киль вертолета приходится делать куда толще, чем в классической схеме, что приводит к увеличению массы аппарата.
NOTAR
В качестве основной альтернативы рулевому винту выступает система NOTAR, использующая для компенсации реактивного момента воздушный поток от главного винта. Суть механизма в следующем. В основании полой хвостовой балки находится пропеллер, работающий от двигателя несущего винта. В процессе полета он нагнетает воздух и создает давление внутри хвостовой балки. Часть нагнетаемого воздуха испускается через две продольные прорези в киле, расположенные на его правой стороне (при условии, что главный винт вращается по часовой стрелке). Испускаемый через прорези воздух за счет эффекта Коанда заставляет воздушный поток от несущего винта устремляться не вниз, а левее, то есть в противоположную закручиванию сторону. Оставшаяся часть воздушного потока выходит через сопла в самом хвосте киля слева, таким образом создается дополнительный реактивный уравновешивающий момент.
В-третьих, фенестрон эффективнее открытого винта – при одинаковых диаметрах ему нужно меньше энергии.
Однако есть у конструкции с фенестроном существенный минус: киль вертолета приходится делать куда толще, чем в классической схеме, что приводит к увеличению массы аппарата.
NOTAR
В качестве основной альтернативы рулевому винту выступает система NOTAR, использующая для компенсации реактивного момента воздушный поток от главного винта. Суть механизма в следующем. В основании полой хвостовой балки находится пропеллер, работающий от двигателя несущего винта. В процессе полета он нагнетает воздух и создает давление внутри хвостовой балки. Часть нагнетаемого воздуха испускается через две продольные прорези в киле, расположенные на его правой стороне (при условии, что главный винт вращается по часовой стрелке). Испускаемый через прорези воздух за счет эффекта Коанда заставляет воздушный поток от несущего винта устремляться не вниз, а левее, то есть в противоположную закручиванию сторону. Оставшаяся часть воздушного потока выходит через сопла в самом хвосте киля слева, таким образом создается дополнительный реактивный уравновешивающий момент.
Фото сверху: Система NOTAR в вертолете MD 902 EXPLORER, www.theclearing.co.uk. Фото снизу: Система NOTAR, www.aerofriends.hu
Два винта вместо одного
Довольно очевидный метод устранения реактивного момента заключается в том, чтобы установить на летательный аппарат не один, а два винта, вращающихся в разные стороны и, соответственно, компенсирующих реактивные моменты друг друга. Впервые эта мысль пришла в голову Ломоносову: в 1754 году на конференции Академии наук он представил проект непилотируемого летательного аппарата с двумя винтами, расположенными на параллельных осях.
Ka-50 - двухдвигательный одноместный вертолет с соосным расположением несущих винтов. Фото: Dmitriy Pichugin, www.airliners.net
По такой схеме сегодня строят вертолеты с продольно расположенными несущими винтами: один находится на передней части фюзеляжа, а другой – на хвостовой. Обычно такие конструкции используются на тяжелых вертолетах, способных транспортировать массивные грузы.
Более компактные и легкие вертолеты с двумя винтами строятся по схеме, соответственно которой один винт находится под другим прямо на одной оси. В такой конструкции нет необходимости делать длинную хвостовую балку, как в схеме с рулевым винтом, или вытянутый фюзеляж, как в схеме с продольными винтами.
 Boeing CH-47 Chinook с продольно расположенными несущими винтами. Фото: Дмитрий Срибный, www.aviationphotos.net
ИЗ ОПИСАНИЯ МЕХАНИКИ полета становится понятно, что управлять вертолетом довольно сложно, так как каждый механизм отвечает за что-то свое, но сильно связан с остальными, и поэтому при изменении одного параметра полета приходится сразу корректировать другие. К примеру, во время полета пилоту захотелось увеличить скорость. Он наклоняет ручку управления от себя, и весь вертолет наклоняется вперед. Это значит, что часть тяги главного винта перешла из вертикальной составляющей в горизонтальную, поэтому вертолет хоть и увеличивает скорость, но теряет высоту. Тогда пилот увеличивает шаг главного винта (тягу), чтобы остаться на прежней высоте. Но, увеличив шаг винта, он увеличил и реактивный момент, который нужно скомпенсировать рулевым винтом, иначе курс полета изменится.
Boeing CH-47 Chinook с продольно расположенными несущими винтами. Фото: Дмитрий Срибный, www.aviationphotos.net
ИЗ ОПИСАНИЯ МЕХАНИКИ полета становится понятно, что управлять вертолетом довольно сложно, так как каждый механизм отвечает за что-то свое, но сильно связан с остальными, и поэтому при изменении одного параметра полета приходится сразу корректировать другие. К примеру, во время полета пилоту захотелось увеличить скорость. Он наклоняет ручку управления от себя, и весь вертолет наклоняется вперед. Это значит, что часть тяги главного винта перешла из вертикальной составляющей в горизонтальную, поэтому вертолет хоть и увеличивает скорость, но теряет высоту. Тогда пилот увеличивает шаг главного винта (тягу), чтобы остаться на прежней высоте. Но, увеличив шаг винта, он увеличил и реактивный момент, который нужно скомпенсировать рулевым винтом, иначе курс полета изменится.
Более компактные и легкие вертолеты с двумя винтами строятся по схеме, соответственно которой один винт находится под другим прямо на одной оси. В такой конструкции нет необходимости делать длинную хвостовую балку, как в схеме с рулевым винтом, или вытянутый фюзеляж, как в схеме с продольными винтами.
Boeing CH-47 Chinook с продольно расположенными несущими винтами. Фото: Дмитрий Срибный, www.aviationphotos.net
Вид из кабины вертолета Bell Griffin. Фото: Ian Forshaw, www.defenceimagery.mod.uk
Чтобы со всем этим справиться и ничего не упустить, тело пилота и все органы управления вертолетом должны в результате многочисленных тренировок слиться в единый организм. В этом симбиозе человека и машины вертолет становится как бы надстройкой над человеком, новой функцией, которой нужно научиться управлять, так же как мы учимся управлять своими руками и ногами, чтобы начать ползать или ходить. Когда все движения в кабине пилота дойдут до автоматизма, можно с уверенностью сказать, что он приручил воздух и исполнил мечту многих поколений изобретателей.
Технологии
Дмитрий Жиляев
Машины и Механизмы
Всего 0 комментариев

 Мультикоптер: начатый полет
Мультикоптер: начатый полет Молодильные «яблоки». Как остановить старение
Молодильные «яблоки». Как остановить старение Поправьте мне геном
Поправьте мне геном Около вращающихся черных дыр пространство-время ведет себя как квантовый компьютер
Около вращающихся черных дыр пространство-время ведет себя как квантовый компьютер Эпоха геликоптеров в лицах
Эпоха геликоптеров в лицах