Подводные роботы смогут «плавать» как дельфины и косатки
Татьяна Лебедева –
Исследователи раскрыли секреты эффективности плавания китов и дельфинов, чтобы применить данные для создания подводных роботов следующего поколения.
Впервые ученые смогли разработать модель, которая могла бы предсказать, как движения плавника должны соотносятся с его формой. Это позволит создать максимально эффективных подводных роботов. Такие роботы будут быстрыми, маневренными и акустически скрытными. Другими словами, они будут очень похожи на дельфинов или косаток.
«Мы заинтересованы в разработке следующего поколения подводных аппаратов, поэтому и пытаемся понять, как дельфины и киты плавают так эффективно. Мы изучаем, как устроены эти животные и что полезного можно взять от них для разработки подводных плавательных роботов с точки зрения плавательных характеристик или механики плавания этих животных», — говорит Кейт Мур, доцент Lehigh University's P.C. Rossin College of Engineering and Applied Science.
Статья об этом открытии была недавно опубликована в Journal of the Royal Society Interface.
Хвостовые плавники китообразных бывают самых разных форм. Их кинематика (то, как эти животные двигают плавниками) также различна. Некоторые китообразные могут хлопать плавниками с большей амплитудой или наклонять их под более крутым углом. Исследователи хотели лучше понять эту взаимосвязь между двумя переменными, чтобы определить, была ли форма хвостового плавника адаптирована к конкретной кинематике.
Используя данные о форме и кинематике для пяти видов китообразных, исследователи провели моделирование для каждого из видов, чтобы определить пропульсивную эффективность для каждого из видов. Затем они поменяли данные, например, запустив симуляцию формы плавника косатки, привязанную к кинематике дельфина.
«Мы провели 25 таких симуляций с заменой и были очень удивлены. Форма черной (малой) косатки всегда была лучшей, то есть самой эффективной, какую кинематику мы бы ей ни дали. А кинематика белухи всегда была лучшей, независимо от того, к какой форме она была «прикреплена». Мы не ожидали этого, поэтому мы стали больше «копаться» и разработали относительно упрощенную модель того, как эффективность соотносится с различными формами и движениями плавников».
Модель хорошо работала для массива данных, которые исследователи уже сгенерировали, поэтому они расширили набор данных, чтобы изучить любые возникающие тенденции.
Они обнаружили, что их модель не только предсказала эффективность за пределами их набора данных, но также показала, что конкретные формы были адаптированы к конкретной кинематике. Также ученые установили фундаментальную взаимосвязь между циркуляторными силами и виртуальной массой, которые способствуют эффективному движению животного под водой. Циркуляторные силы — это те, что создают подъемную силу, как в самолете.
Ученые обнаружили, что ускорения плавника являются неотъемлемой частью предсказания тенденций эффективности. Ранее считалось, что форма плавников не меняет эффективности.
Наличие модели, которая может предсказать эффективность, основанную на форме и кинематике, обеспечивает базовое проектное уравнение для создания подводного робота, который работает, как китообразный. Таких формул еще не существует, однако потенциал для таких машин огромен.
Быстрые, эффективные и очень маневренные роботы в форме китообразных могут помочь исследователям проверить гипотезы о том, как животные перемещаются под водой и лучше понять поведение косяков рыб. Также такие роботы могут быть использованы для обнаружения подводных лодок или для мониторинга воздействия изменений климата на популяции подводных обитателей.
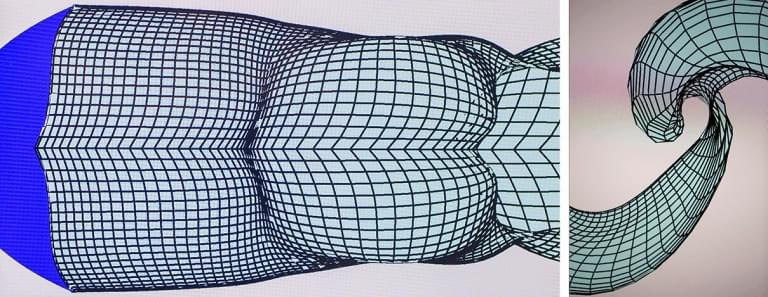
Фото: The wake structure left behind by a swimming dolphin.The result was produced by Lehigh PhD student Fatma Ayancik/Lehigh University
Это новость от журнала ММ «Машины и механизмы». Не знаете такого? Приглашаем прямо сейчас познакомиться с этим удивительным журналом.
{kind=link}